ĪĪĪĪ├└ć°┐Ųčą╚╦åTÅ─“┌“╝Ą─▀\äėĘĮ╩ĮųąĄ├ĄĮņ`ĖąŻ¼čąųŲ│÷ōĒėąČÓ╣Ø╔Ē¾w║═ČÓŚl═╚Ą─ÖCŲ„╚╦Ż¼─▄Ė▀ą¦═©▀^ŲķŹń▓╗ŲĮĄ─┬Ę├µŻ¼▓╗▒žę└┘ćé„ĖąŲ„ļSĢr╠Į£y┬Ę├µŪķørĪŻ
ĪĪĪĪ├└ć°ū¶ų╬üå└Ē╣żīWį║Ą─蹊┐╚╦åTšfŻ¼╦¹éāķ_░l│÷ę╗éĆą┬Ą─└Ēšō┐“╝▄Ż¼═Ų╦Ń╣Øų½ą═ÖCŲ„╚╦į┌ŲķŹń┬Ę├µ╔ŽĄ─═©ąąą¦┬╩Ż¼▓óųŲįņ│÷▓╗═¼ęÄĖ±Ą─ÖCŲ„╚╦▀Mąąįć“ׯ¼░l¼F═╚▒╚▌^ČÓĄ─ÖCŲ„╚╦ą¦┬╩Ė³Ė▀ĪŻĖ∙ō■▀@ĘNįOėŗ╦╝┬ĘŻ¼┐╔═¹čąųŲ│÷▀m║Ž▐r╠’ū„śI║═Š╚×─Ą╚ł÷║ŽĄ─ą┬ą═╦čŠ╚ÖCŲ„╚╦ĪŻŽÓĻPšō╬─░l▒Ēį┌ą┬ę╗Ų┌├└ć°ĪČ┐ŲīWĪĘļsųŠ╔ŽĪŻ
ĪĪĪĪ蹊┐╚╦åTė├3D┤“ėĪ╝╝ągųŲįņąĪą═Ą─ÖCŲ„╚╦╔Ē¾wŻ¼├┐╣Ø╔Ē¾wČ╝ėą2Śl═╚▓ó┼õéõöĄ┼_░läėÖCŻ¼╚╗║¾ūī═╚öĄ▓╗═¼Ą─ÖCŲ„╚╦Ę┤Å══©▀^ČčØMąĪĘĮēKĪóĖ▀Ą═▓╗ŲĮĄ─┬Ę├µŻ¼Å─ųĖČ©Ų³cŪ░═∙60└Õ├ū▀h╠ÄĄ─ĮK³cĪŻĮY╣¹░l¼FŻ¼āHėą6Śl═╚Ą─ÖCŲ„╚╦▒Ē¼F║▄▓╗ĘĆČ©Ż¼├┐┤╬įć“×║─┘MĄ─Ģrķg▓Ņ«É▌^┤¾;Č°ėą14╗“16Śl═╚Ą─ÖCŲ„╚╦═©ąąĖ³╝ė┐ņ╦┘Ż¼Č°Ūę├┐┤╬║─┘MĄ─Ģrķg▓Ņ▓╗ČÓĪŻ
ĪĪĪĪ╚╦ŅÉąąū▀į┌ŲķŹńŁhŠ│ųąĢr▒žĒÜąĪą─ė^▓ņŻ¼Ė∙ō■┬Ę├µŪķørļSĢrū„│÷Ę┤æ¬Ż¼ī”ÖCŲ„╚╦üĒšf▀@Š═ęŌ╬Čų°ąĶę¬┼õéõ┤¾┴┐é„ĖąŲ„Ż¼Ģ■┤¾Ę∙╠ßĖ▀│╔▒ŠŻ¼Č°Ūęé„ĖąŲ„į┌É║┴ėŁhŠ│ųą║▄╚▌ęūōpē─ĪŻą┬ą═ÖCŲ„╚╦īó▀\äėĘųČ╬╠Ä└ĒŻ¼▓╗ąĶę¬Ė∙ō■é„ĖąŲ„Ą─īŹĢr╠Į£yüĒš{š¹äėū„Ż¼Ė³╝ėĖ▀ą¦īŹė├ĪŻ
ĪĪĪĪ╬─š┬ā╚╚▌āH╣®ķåūxŻ¼▓╗śŗ│╔═Č┘YĮ©ūhŻ¼šłųö╔„ī”┤²ĪŻ═Č┘Yš▀ō■┤╦▓┘ū„Ż¼’LļUūįō·ĪŻ
║Żł¾╔·│╔ųą...

║Ż╦ćAIĄ──Żą═ŽĄĮyį┌ć°ļH╩ął÷╔ŽÅV╩▄║├įuŻ¼─┐Ū░šŠā╚└█ėŗ─Żą═öĄ│¼▀^80╚féĆŻ¼║Ł╔wīæīŹĪóČ■┤╬į¬Īó▓Õ«ŗĪóįOėŗĪóözė░Īó’LĖ±╗»łDŽ±Ą╚ČÓŅÉą═æ¬ė├ł÷Š░Ż¼╗∙▒ŠĖ▓╔w╦∙ėąų„┴„äōū„’LĖ±ĪŻ
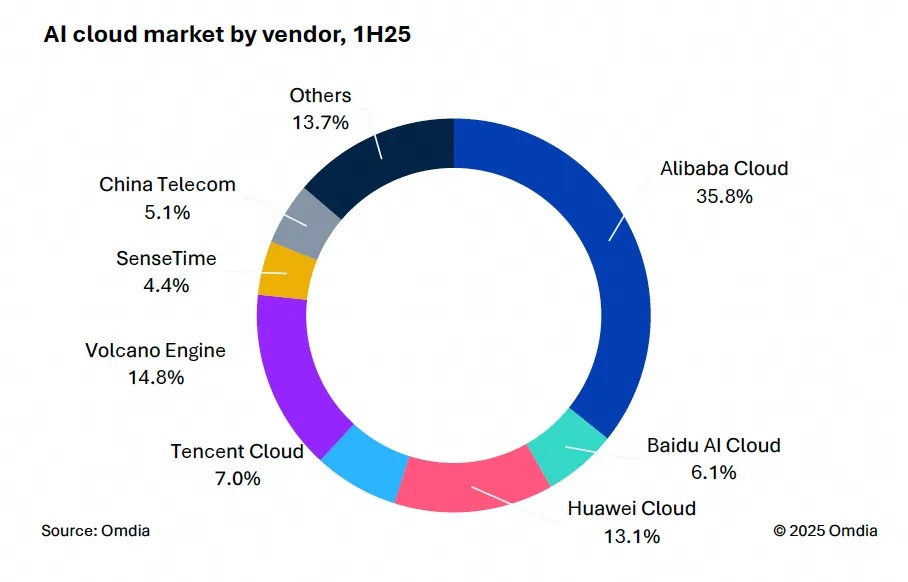
9į┬9╚šŻ¼ć°ļHÖÓ═■╩ął÷š{čąÖCśŗėóĖ╗┬³(Omdia)░l▓╝┴╦ĪČųąć°AIįŲ╩ął÷Ż¼1H25ĪĘł¾ĖµĪŻųąć°AIįŲ╩ął÷░ó└’įŲš╝▒╚8%╬╗┴ąĄ┌ę╗ĪŻ

9į┬24╚šŻ¼╚A×ķ└żņ`š┘ķ_Ī░ųŪ─▄¾w“ׯ¼ę╗Ų┴ĄĮ╬╗Ī▒╚A×ķIdeaHubŪ¦ąą░┘śI¾w“×╣┘ėŗäØ░l▓╝Ģ■ĪŻ

č┼±R╣■ū“╚šą¹▓╝═Ų│÷ā╔┐ŅŅ^┤„╩ĮČ·ÖCŻ¼Ęųäe╩ŪŲĮ░Õš±─żĄ─YH-4000║═äė╚”įŁ└ĒĄ─YH-C3000ĪŻ
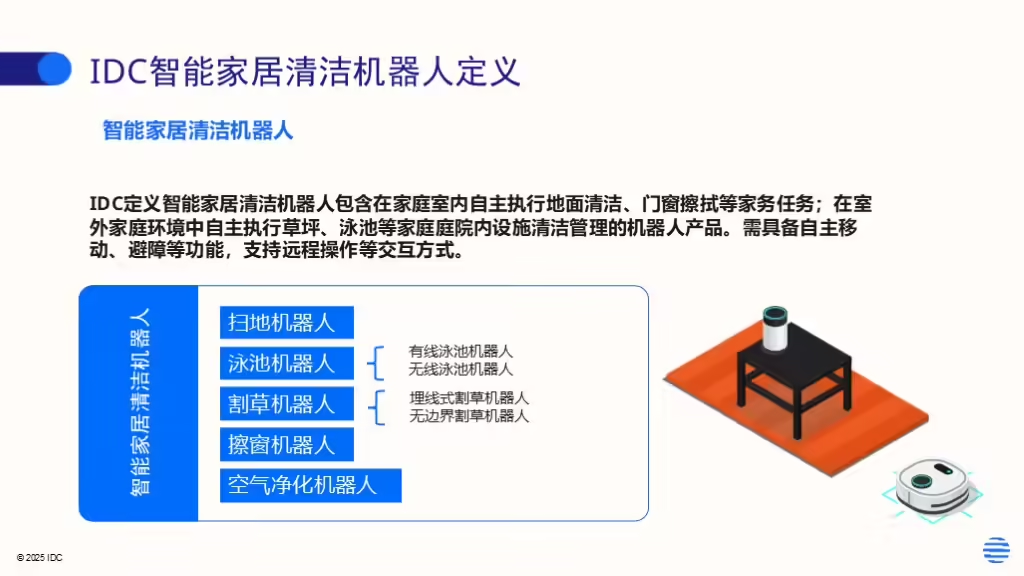
IDCĮ±╚š░l▓╝Ą─ĪČ╚½Ū“ųŪ─▄╝ęŠėŪÕØŹÖCŲ„╚╦įOéõ╩ął÷╝ŠČ╚Ė·█Öł¾ĖµŻ¼2025─ĻĄ┌Č■╝ŠČ╚ĪĘ’@╩ŠŻ¼╔Ž░ļ─Ļ╚½Ū“ųŪ─▄╝ęŠėŪÕØŹÖCŲ„╚╦╩ął÷│÷žø1,2╚f┼_Ż¼═¼▒╚į÷ķL33%Ż¼’@╩Š│÷ŲĘŅÉÅŖä┼Ą─╩ął÷ąĶŪ¾ĪŻ

ĘĄ╗žų„Ēō ®« ĻPė┌╬ęéā ®« ā╚╚▌┬ōŽĄ ®« ┬ōŽĄ╬ęéā ®« ├Ōž¤┬Ģ├„ ®« įŁäōą┬┬ä ®« ķTæ¶░µ
Copyright www.9c1h.cn ųą╬─┐Ų╝╝┘YėŹ 2009-2025 all rights reserved ŠWšŠ┬ōŽĄ╬óą┼ xishuinet
ĻPµIį~Ż║CITNews|Citnewsųą╬─┐Ų╝╝┘YėŹ|ųą╬─┐Ų╝╝┘YėŹŠW|┐Ų╝╝┘YėŹŠW|ųąć°┐Ų╝╝┘YėŹ|ųąć°┐Ų╝╝ą┬┬äŠW|ųąć°┐Ų╝╝┘YėŹŠW|┐ņ┐Ų╝╝|ą┬┐Ų╝╝|ųą╬─┐Ų╝╝öĄ┤aŅ^Śl╠¢|ųą╬─ęŲäėą┬├Į¾w