ĪĪĪĪšŃĮŁ┤¾īWĄ─蹊┐╚╦åTūŅĮ³╠ß│÷┴╦ę╗ĘN├¹×ķUrbanGIRAFFEĄ─äōą┬ĘĮĘ©Ż¼ė├ė┌ĮŌøQŠ▀ėą╠¶æąįĄ─│Ū╩ął÷Š░Ą─┐╔┐ž3DĖąų¬łDŽ±║Ž│╔å¢Ņ}ĪŻįōĘĮĘ©═©▀^ę²╚ļ┐╔┐žĄ─ŽÓÖCū╦ä▌║═ł÷Š░ā╚╚▌Ż¼ęįīŹ¼F▒ŲšµĄ─łDŽ±║Ž│╔Ż¼╠žäe╩Ūį┌╠Ä└ĒŠ▀ėą╠¶æąįĄ─│Ū╩ąŁhŠ│ĢrĪŻ
ĪĪĪĪUrbanGIRAFFE▓╔ė├┴╦ę╗ĘNĮM║Ž║═┐╔┐žĄ─▓▀┬įŻ¼└¹ė├┴╦┤ų▓┌Ą─3D╚½Š░Ž╚“ׯ¼░³└©¤oĘ©ėŗöĄĄ─╬’¾w║═┐╔ėŗöĄĄ─ī”Ž¾Ą─▓╝ŠųĘų▓╝ĪŻįōĘĮĘ©īół÷Š░ĘųĮŌ×ķ╬’¾wĪó╬’¾w║═╠ņ┐šŻ¼Å─Č°īŹ¼Fī”ł÷Š░Ą─ČÓśė┐žųŲŻ¼╚ń┤¾ĘČć·ŽÓÖCęŲäėĪó╬’¾wŠÄ▌ŗ║═╬’¾w▓┘ū„ĪŻ
ĪĪĪĪį┌▀^╚źĄ─Śl╝■łDŽ±║Ž│╔ĘĮĘ©ųąŻ¼ęį╔·│╔▒ŲšµłDŽ±×ķ─┐ś╦Ą─ĘĮĘ©ęč╚ĪĄ├┴╦’@ų°▀Mš╣Ż¼╠žäe╩Ū─Ūą®└¹ė├╔·│╔ī”┐╣ŠWĮj(GANs)Ą─ĘĮĘ©ĪŻ╚╗Č°Ż¼¼FėąĘĮĘ©ų„ꬎ▐ė┌ęįī”Ž¾×ķųąą─Ą─ł÷Š░Ż¼▓óŪęį┌╠Ä└ĒÅ═ļsŪę▓╗ī”²RĄ─│Ū╩ął÷Š░Ģr┤µį┌ŠųŽ▐ąįĪŻUrbanGIRAFFEätīŻūóė┌│Ū╩ął÷Š░Ż¼═©▀^ę²╚ļ3DĖąų¬Ą─╔·│╔─Żą═Ż¼┐╦Ę■┴╦▀@ą®Ž▐ųŲŻ¼×ķ┤¾ĘČć·ŽÓÖCęŲäėĪó╬’¾wŠÄ▌ŗ║═╬’¾w▓┘ū„╠ß╣®┴╦ČÓśėĄ─┐╔┐žąįĪŻ
ĪĪĪĪUrbanGIRAFFEĄ─äōą┬ų«╠Äį┌ė┌īó│Ū╩ął÷Š░Ū╔├ŅĄžĘųĮŌ×ķ¤oĘ©ėŗöĄĄ─╬’¾wĪó┐╔ėŗöĄĄ─ī”Ž¾║═╠ņ┐šŻ¼└¹ė├Ž╚“×Ęų▓╝üĒ└ĒŪÕÅ═ļsĄ─│Ū╩ąŁhŠ│ĪŻįō─Żą═░³└©ę╗éĆŚl╝■╬’¾w╔·│╔Ų„Ż¼└¹ė├šZ┴x¾w╦žŠWĖ±ū„×ķ╬’¾wŽ╚“ׯ¼ęį╝»│╔┤ų▓┌Ą─šZ┴x║═Äū║╬ą┼ŽóĪŻ═©▀^į┌╗ņüyĄ─ł÷Š░ųąīW┴Ģī”Ž¾╔·│╔Ų„Ą─ī”Ž¾▓╝ŠųŽ╚“ׯ¼─Żą═į┌ī”┐╣ąį║═ųžśŗōp╩¦Ą─Č╦ĄĮČ╦ė¢ŠÜųąĄ├ęįā×╗»Ż¼└¹ė├╔õŠĆ-¾w╦ž║═╔õŠĆ-║ąĮ╗▓µ▓▀┬įüĒā×╗»▓╔śė╬╗ų├Ż¼£p╔┘╦∙ąĶ▓╔śė³cĄ─öĄ┴┐ĪŻ
ĪĪĪĪį┌╚½├µĄ─įu╣└ųąŻ¼UrbanGIRAFFEĘĮĘ©į┌║Ž│╔║═šµīŹöĄō■╝»╔Ž│¼įĮ┴╦Ė„ĘN2D║═3D╗∙ŠĆŻ¼š╣╩Š┴╦│÷╔½Ą─┐╔┐žąį║═▒ŻšµČ╚ĪŻį┌KITTI-360öĄō■╝»╔Ž▀MąąĄ─Č©ąįįu╣└’@╩ŠŻ¼UrbanGIRAFFEį┌▒│Š░Į©─ŻĘĮ├µā×ė┌GIRAFFEŻ¼īŹ¼F┴╦į÷ÅŖĄ─╬’¾wŠÄ▌ŗ║═ŽÓÖCęĢĮŪ┐žųŲĪŻį┌KITTI-360╔Ž▀MąąĄ─Ų╩╬÷蹊┐ūCīŹ┴╦UrbanGIRAFFEĄ─╝▄śŗĮM╝■Ą─ėąą¦ąįŻ¼░³└©ųžśŗōp╩¦Īóī”Ž¾┼ąäeŲ„║═äōą┬Ą─ī”Ž¾Į©─ŻĪŻį┌═ŲöÓŲ┌ķg▓╔ė├ęŲäėŲĮŠ∙─Żą═▀Mę╗▓Į╠ßĖ▀┴╦╔·│╔łDŽ±Ą─┘|┴┐ĪŻ
ĪĪĪĪUrbanGIRAFFEĄ─╬┤üĒ╣żū„░³└©ę²╚ļšZ┴x¾w╦ž╔·│╔Ų„Ż¼ęį▀Mąąą┬Ęfł÷Š░▓╔śėŻ¼▓ó═©▀^╣Ō-ŁhŠ│Ņü╔½ĮŌ└püĒ╠Į╦„╣Ōšš┐žųŲĪŻ╬─š┬ÅŖš{┴╦ųžśŗōp╩¦Ą─ųžę¬ąįŻ¼ęį▒Ż│ų▒ŻšµČ╚▓ó«a╔·ČÓśėĄ─ĮY╣¹Ż¼ė╚Ųõ╩Ūī”ė┌▓╗Įø│Żė÷ĄĮĄ─šZ┴xŅÉäeĪŻ
ĪĪĪĪįō蹊┐š╣╩Š┴╦UrbanGIRAFFEį┌╠Ä└ĒŠ▀ėą╠¶æąįĄ─│Ū╩ął÷Š░Ą─┐╔┐ž3DĖąų¬łDŽ±║Ž│╔å¢Ņ}ĘĮ├µĄ─ū┐įĮ│╔Š═Ż¼īŹ¼F┴╦į┌ŽÓÖCęĢĮŪ▓┘ū„ĪóšZ┴x▓╝Šų║═╬’¾wĮ╗╗źĘĮ├µĄ─ū┐įĮČÓ╣”─▄ąįĪŻ═©▀^└¹ė├3D╚½Š░Ž╚“ׯ¼įō─Żą═ėąą¦Ąžīół÷Š░ĘųĮŌ×ķ╬’¾wĪó╬’¾w║═╠ņ┐šŻ¼┤┘▀M┴╦ĮM║Ž╔·│╔Į©─ŻĪŻ╬┤üĒĄ─蹊┐ĘĮŽ“░³└©š¹║ŽšZ┴x¾w╦ž╔·│╔Ų„ęį▀Mąąą┬Ęfł÷Š░▓╔śėŻ¼▓ó═©▀^╣Ō-ŁhŠ│Ņü╔½ĮŌ└püĒ╠Į╦„╣Ōšš┐žųŲĪŻ UrbanGIRAFFE═©▀^į┌║Ž│╔║═īŹļHöĄō■╝»╔Ž▀Mąą╚½├µįu╣└Ż¼š╣╩Š┴╦į┌┐╔┐žąį║═▒ŻšµČ╚ĘĮ├µ│¼įĮĖ„ĘN2D║═3D╗∙ŠĆĄ─│÷╔½ąį─▄ĪŻ
ĪĪĪĪ╬─š┬ā╚╚▌āH╣®ķåūxŻ¼▓╗śŗ│╔═Č┘YĮ©ūhŻ¼šłųö╔„ī”┤²ĪŻ═Č┘Yš▀ō■┤╦▓┘ū„Ż¼’LļUūįō·ĪŻ
║Żł¾╔·│╔ųą...

║Ż╦ćAIĄ──Żą═ŽĄĮyį┌ć°ļH╩ął÷╔ŽÅV╩▄║├įuŻ¼─┐Ū░šŠā╚└█ėŗ─Żą═öĄ│¼▀^80╚féĆŻ¼║Ł╔wīæīŹĪóČ■┤╬į¬Īó▓Õ«ŗĪóįOėŗĪóözė░Īó’LĖ±╗»łDŽ±Ą╚ČÓŅÉą═æ¬ė├ł÷Š░Ż¼╗∙▒ŠĖ▓╔w╦∙ėąų„┴„äōū„’LĖ±ĪŻ
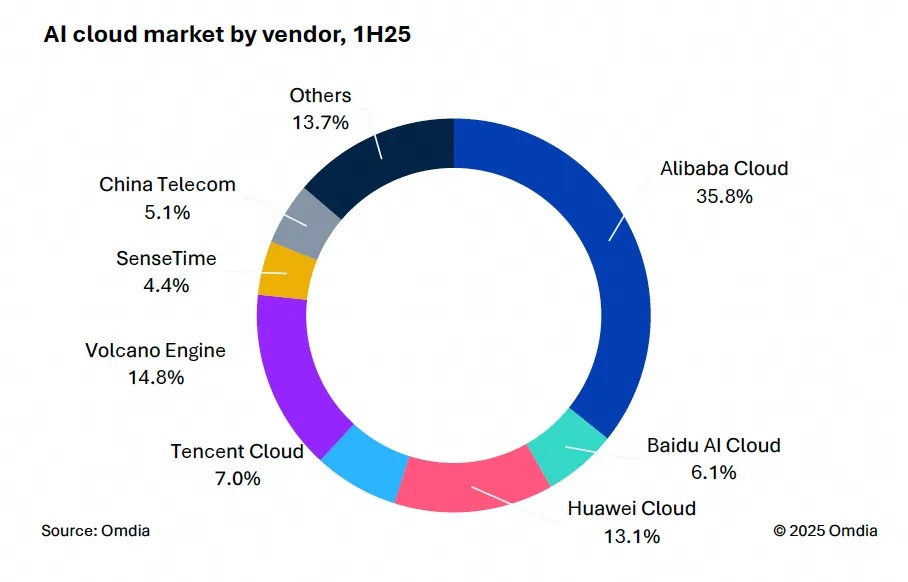
9į┬9╚šŻ¼ć°ļHÖÓ═■╩ął÷š{čąÖCśŗėóĖ╗┬³(Omdia)░l▓╝┴╦ĪČųąć°AIįŲ╩ął÷Ż¼1H25ĪĘł¾ĖµĪŻųąć°AIįŲ╩ął÷░ó└’įŲš╝▒╚8%╬╗┴ąĄ┌ę╗ĪŻ

9į┬24╚šŻ¼╚A×ķ└żņ`š┘ķ_Ī░ųŪ─▄¾w“ׯ¼ę╗Ų┴ĄĮ╬╗Ī▒╚A×ķIdeaHubŪ¦ąą░┘śI¾w“×╣┘ėŗäØ░l▓╝Ģ■ĪŻ

č┼±R╣■ū“╚šą¹▓╝═Ų│÷ā╔┐ŅŅ^┤„╩ĮČ·ÖCŻ¼Ęųäe╩ŪŲĮ░Õš±─żĄ─YH-4000║═äė╚”įŁ└ĒĄ─YH-C3000ĪŻ
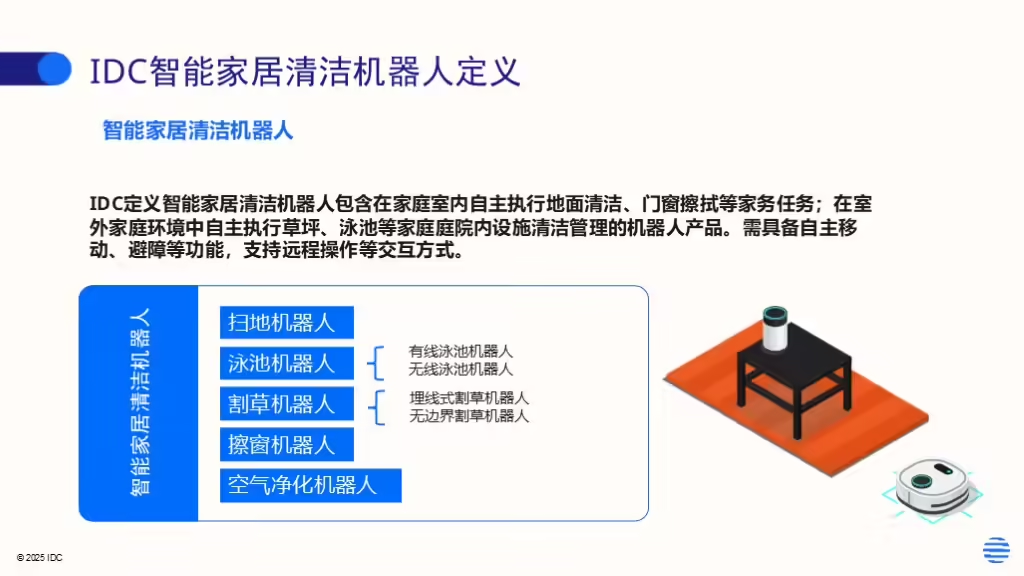
IDCĮ±╚š░l▓╝Ą─ĪČ╚½Ū“ųŪ─▄╝ęŠėŪÕØŹÖCŲ„╚╦įOéõ╩ął÷╝ŠČ╚Ė·█Öł¾ĖµŻ¼2025─ĻĄ┌Č■╝ŠČ╚ĪĘ’@╩ŠŻ¼╔Ž░ļ─Ļ╚½Ū“ųŪ─▄╝ęŠėŪÕØŹÖCŲ„╚╦╩ął÷│÷žø1,2╚f┼_Ż¼═¼▒╚į÷ķL33%Ż¼’@╩Š│÷ŲĘŅÉÅŖä┼Ą─╩ął÷ąĶŪ¾ĪŻ

ĘĄ╗žų„Ēō ®« ĻPė┌╬ęéā ®« ā╚╚▌┬ōŽĄ ®« ┬ōŽĄ╬ęéā ®« ├Ōž¤┬Ģ├„ ®« įŁäōą┬┬ä ®« ķTæ¶░µ
Copyright www.9c1h.cn ųą╬─┐Ų╝╝┘YėŹ 2009-2025 all rights reserved ŠWšŠ┬ōŽĄ╬óą┼ xishuinet
ĻPµIį~Ż║CITNews|Citnewsųą╬─┐Ų╝╝┘YėŹ|ųą╬─┐Ų╝╝┘YėŹŠW|┐Ų╝╝┘YėŹŠW|ųąć°┐Ų╝╝┘YėŹ|ųąć°┐Ų╝╝ą┬┬äŠW|ųąć°┐Ų╝╝┘YėŹŠW|┐ņ┐Ų╝╝|ą┬┐Ų╝╝|ųą╬─┐Ų╝╝öĄ┤aŅ^Śl╠¢|ųą╬─ęŲäėą┬├Į¾w