ĪĪĪĪGaussian-SLAM╩Ūę╗ĒŚą┬┼d╝╝ągŻ¼┐╔ęį═©▀^Ęų╬÷ęĢŅl┴„ųąĄ─łDŽ±üĒäōĮ©▒ŲšµĄ─3D─Żą═Ż¼Å─Č°ųžĮ©¼FīŹ╩└Įńł÷Š░ĪŻ
ĪĪĪĪ═©▀^ė^┐┤ę╗éĆęĢŅlŻ¼Gaussian-SLAM┐╔ęįĘų╬÷ęĢŅlųąĄ─łDŽ±Ż¼─▄ē“└ĒĮŌęĢŅlųąĄ─ŁhŠ│▓╝Šų║═╬’¾wĄ─╬╗ų├ĪŻ╚╗║¾└¹ė├▀@ą®łDŽ±öĄō■üĒäōĮ©Īó▀ĆįŁ┐╔ęįÅ─Ė„éĆĮŪČ╚ė^▓ņĄ─3D─Żą═Ż¼ųžĮ©¼FīŹ╩└Įńł÷Š░ĪŻ▀@ę╗▀^│╠╩ŪīŹĢrõų╚ŠĄ─Ż¼┐╔ęįÄ═ų·ė├æ¶į┌ėŗ╦ŃÖC╔Ž▓ķ┐┤║═╠Į╦„3D╠ōöMŁhŠ│ĪŻ
ĪĪĪĪ┼e└²üĒšfŻ¼╚ń╣¹─Ńėąę╗éĆį┌╣½ł@┼─özĄ─ęĢŅlŻ¼Ųõųą░³└©śõ─ŠĪóķLę╬ĪóąĪ┬Ę║═ąą╚╦Ą╚╬’¾wĪŻé„ĮyĄ─ęĢŅlų╗─▄╠ß╣®Č■ŠSęĢĮŪŻ¼Ą½╩Ū╩╣ė├Gaussian-SLAM╝╝ągŻ¼╬ęéā┐╔ęįĘų╬÷ęĢŅlųąĄ─Ė„éĆ╬’¾wŻ¼▓ó┴╦ĮŌ╦³éāį┌┐šķgųąĄ─ŽÓī”╬╗ų├ĪŻ
ĪĪĪĪ═©▀^Ęų╬÷ęĢŅlųą╬’¾wĄ─ęŲäė║═ęĢĮŪūā╗»Ż¼Gaussian-SLAM┐╔ęįėŗ╦Ń│÷▀@ą®╬’¾wį┌╚²ŠS┐šķgųąĄ─╬╗ų├║═ą╬ĀŅĪŻūŅĮKŻ¼▀@ĒŚ╝╝ąg┐╔ęįäōĮ©ę╗éĆ╣½ł@Ą─öĄūųÅ═ųŲŲĘĄ─╚²ŠS─Żą═Ż¼╩╣ė├æ¶┐╔ęįÅ─╚╬║╬ĮŪČ╚▓ķ┐┤╣½ł@Ą─├┐éĆĮŪ┬õŻ¼░³└©śõ─ŠĪóķLę╬║═╚╦éāĄ─╗ŅäėĪŻ
ĪĪĪĪGaussian-SLAMĄ─ų„ę¬╣”─▄╠ž³c║═╣żū„įŁ└Ē╚ńŽ┬:
ĪĪĪĪų„ę¬╣”─▄╠ž³c:
ĪĪĪĪ1Īó╣ŌīWšµīŹĄ─õų╚Š:─▄ē“ęįĖ▀Č╚šµīŹĄ─ĘĮ╩ĮųžĮ©║═õų╚ŠšµīŹ╩└Įń║═║Ž│╔ł÷Š░ĪŻ
ĪĪĪĪ2ĪóĖ▀╦╣░▀³cł÷Š░▒Ē╩Š:╩╣ė├Ė▀╦╣░▀³cū„×ķł÷Š░Ą─ų„ę¬▒Ē╩Šå╬╬╗Ż¼▀@╩Ūę╗ĘNą┬ĘfĄ─ĘĮĘ©Ż¼┼cé„ĮyĄ─³cįŲ╗“ŠWĖ±▒Ē╩Š▓╗═¼ĪŻ
ĪĪĪĪ3ĪóĮ╗╗ź╩ĮĢrķgųžĮ©:į╩įSį┌Į╗╗źĢrķgā╚ųžĮ©ł÷Š░Ż¼╝┤ųžĮ©▀^│╠ūŃē“┐ņŻ¼┐╔ęįīŹĢrõų╚Š╗“Į³īŹĢr▀MąąĪŻ
ĪĪĪĪ4Īó▀mė├ė┌å╬─┐RGBD▌ö╚ļ:ßśī”å╬─┐RGBD(╝tŠG╦{╔ŅČ╚)▌ö╚ļöĄō■▀Mąąā×╗»Ż¼▀mė├ė┌ČÓĘNł÷Š░ĪŻ
ĪĪĪĪGaussian-SLAM╠žäeßśī”Ą─╩ŪRGBDözŽ±Ņ^Ą─▌ö╚ļöĄō■▀Mąąā×╗»Ż¼▀@ĘNözŽ±Ņ^│²┴╦▓ČūĮŲš═©Ą─▓╩╔½łDŽ±═ŌŻ¼▀Ć─▄╠ß╣®├┐éĆŽ±╦ž³cĄ─╔ŅČ╚ą┼ŽóŻ¼ī”ė┌äōĮ©£╩┤_Ą─╚²ŠSł÷Š░─Żą═ų┴ĻPųžę¬ĪŻ
ĪĪĪĪ╣żū„įŁ└Ē:
ĪĪĪĪGaussian-SLAMĄ─╣żū„įŁ└Ēų„ę¬░³└©öĄō■╠Ä└ĒĪó3DĖ▀╦╣│§╩╝╗»Īół÷Š░śŗĮ©ĪóĻPµIļ┤µā”┼cõų╚Šęį╝░ā×╗»┼cĖ³ą┬ĪŻ═©▀^Įė╩šRGBDĻPµIļ▌ö╚ļŻ¼▀Mąąūė▓╔śė▓ó┐╝æ]Ņü╔½╠▌Č╚Ż¼īó▓╔śė³c═Čė░ĄĮ3D┐šķgŻ¼į┌▀@ą®▓╔śė╬╗ų├│§╩╝╗»ą┬Ą─Ė▀╦╣Ż¼ą┬Ą─3DĖ▀╦╣▒╗╠Ē╝ėĄĮ╚½ŠųĄžłDĄ─«öŪ░╗Ņäė▓┐ĘųųąŻ¼ą╬│╔ł÷Š░Ą─ę╗▓┐ĘųĪŻ▌ö╚ļĄ─RGBDĻPµIļĢ║Ģr┤µā”Ż¼┼cī”╗ŅäėūėłDėąžĢ½IĄ─Ųõ╦¹ĻPµIļę╗ŲŻ¼▓óõų╚Š╦∙ėąī”╗ŅäėūėłDėąžĢ½IĄ─ĻPµIļŻ¼ūŅ║¾ėŗ╦Ń┼cūėłD▌ö╚ļĻPµIļŽÓĻPĄ─╔ŅČ╚║═Ņü╔½ōp╩¦Ż¼╚╗║¾Ė³ą┬╗ŅäėūėłDųą3DĖ▀╦╣Ą─ģóöĄĪŻ
ĪĪĪĪæ¬ė├ł÷Š░:
ĪĪĪĪGaussian-SLAM▀mė├ė┌ąĶę¬Ė▀Č╚šµīŹĖą║═Š½┤_Č╚Ą─SLAMæ¬ė├Ż¼╚ńūįäė±{±éĪóÖCŲ„╚╦ī¦║ĮĪóį÷ÅŖ¼FīŹ║═╠ōöM¼FīŹĄ╚ĪŻ▀@ĒŚ╝╝ągĄ─│÷¼F×ķ─ŻöM¼FīŹ╩└Įń║═äōįņ▒ŲšµĄ─╠ōöMŁhŠ│╠ß╣®┴╦ą┬Ą─┐╔─▄ąįĪŻ
ĪĪĪĪ╬─š┬ā╚╚▌āH╣®ķåūxŻ¼▓╗śŗ│╔═Č┘YĮ©ūhŻ¼šłųö╔„ī”┤²ĪŻ═Č┘Yš▀ō■┤╦▓┘ū„Ż¼’LļUūįō·ĪŻ
║Żł¾╔·│╔ųą...

║Ż╦ćAIĄ──Żą═ŽĄĮyį┌ć°ļH╩ął÷╔ŽÅV╩▄║├įuŻ¼─┐Ū░šŠā╚└█ėŗ─Żą═öĄ│¼▀^80╚féĆŻ¼║Ł╔wīæīŹĪóČ■┤╬į¬Īó▓Õ«ŗĪóįOėŗĪóözė░Īó’LĖ±╗»łDŽ±Ą╚ČÓŅÉą═æ¬ė├ł÷Š░Ż¼╗∙▒ŠĖ▓╔w╦∙ėąų„┴„äōū„’LĖ±ĪŻ
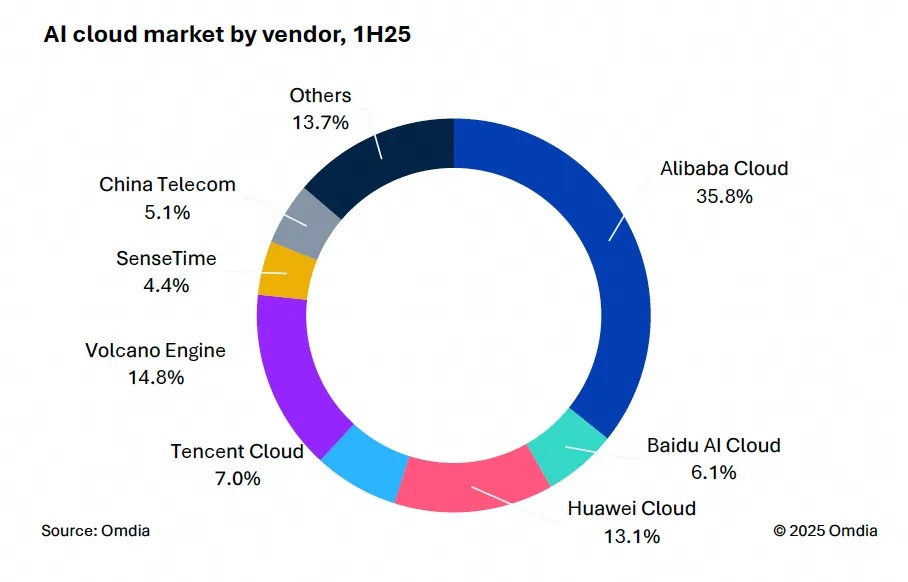
9į┬9╚šŻ¼ć°ļHÖÓ═■╩ął÷š{čąÖCśŗėóĖ╗┬³(Omdia)░l▓╝┴╦ĪČųąć°AIįŲ╩ął÷Ż¼1H25ĪĘł¾ĖµĪŻųąć°AIįŲ╩ął÷░ó└’įŲš╝▒╚8%╬╗┴ąĄ┌ę╗ĪŻ

9į┬24╚šŻ¼╚A×ķ└żņ`š┘ķ_Ī░ųŪ─▄¾w“ׯ¼ę╗Ų┴ĄĮ╬╗Ī▒╚A×ķIdeaHubŪ¦ąą░┘śI¾w“×╣┘ėŗäØ░l▓╝Ģ■ĪŻ

č┼±R╣■ū“╚šą¹▓╝═Ų│÷ā╔┐ŅŅ^┤„╩ĮČ·ÖCŻ¼Ęųäe╩ŪŲĮ░Õš±─żĄ─YH-4000║═äė╚”įŁ└ĒĄ─YH-C3000ĪŻ
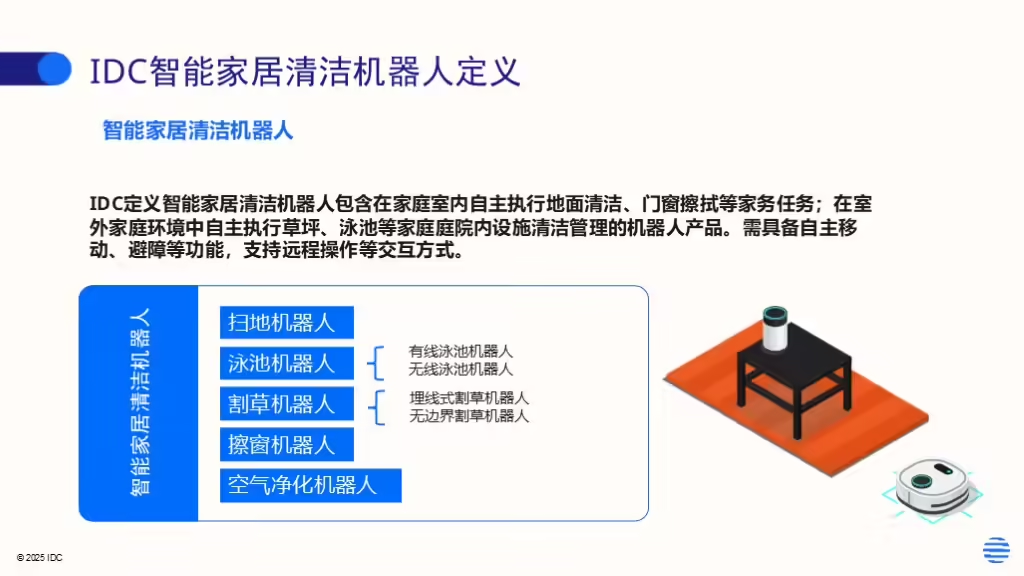
IDCĮ±╚š░l▓╝Ą─ĪČ╚½Ū“ųŪ─▄╝ęŠėŪÕØŹÖCŲ„╚╦įOéõ╩ął÷╝ŠČ╚Ė·█Öł¾ĖµŻ¼2025─ĻĄ┌Č■╝ŠČ╚ĪĘ’@╩ŠŻ¼╔Ž░ļ─Ļ╚½Ū“ųŪ─▄╝ęŠėŪÕØŹÖCŲ„╚╦╩ął÷│÷žø1,2╚f┼_Ż¼═¼▒╚į÷ķL33%Ż¼’@╩Š│÷ŲĘŅÉÅŖä┼Ą─╩ął÷ąĶŪ¾ĪŻ

ĘĄ╗žų„Ēō ®« ĻPė┌╬ęéā ®« ā╚╚▌┬ōŽĄ ®« ┬ōŽĄ╬ęéā ®« ├Ōž¤┬Ģ├„ ®« įŁäōą┬┬ä ®« ķTæ¶░µ
Copyright www.9c1h.cn ųą╬─┐Ų╝╝┘YėŹ 2009-2025 all rights reserved ŠWšŠ┬ōŽĄ╬óą┼ xishuinet
ĻPµIį~Ż║CITNews|Citnewsųą╬─┐Ų╝╝┘YėŹ|ųą╬─┐Ų╝╝┘YėŹŠW|┐Ų╝╝┘YėŹŠW|ųąć°┐Ų╝╝┘YėŹ|ųąć°┐Ų╝╝ą┬┬äŠW|ųąć°┐Ų╝╝┘YėŹŠW|┐ņ┐Ų╝╝|ą┬┐Ų╝╝|ųą╬─┐Ų╝╝öĄ┤aŅ^Śl╠¢|ųą╬─ęŲäėą┬├Į¾w