ĪĪĪĪ╝ė└¹ĖŻ─ßüå┤¾īW╩źĄžüåĖńĘųąŻ(UCSD)║═─Ž╝ė└¹ĖŻ─ßüå┤¾īW(USC)Ą─蹊┐╚╦åTūŅĮ³═Ų│÷┴╦ę╗ĘN├¹×ķ CyberDemo Ą─ą┬ą═╚╦╣żųŪ─▄┐“╝▄Ż¼ų╝į┌═©▀^ęĢėXė^▓ņ▀MąąÖCŲ„╚╦─ŻĘ┬īW┴ĢĪŻ

ĪĪĪĪé„ĮyĄ──ŻĘ┬īW┴ĢĘĮĘ©═©│ŻąĶę¬┤¾┴┐Ė▀┘|┴┐Ą─╩ŠĘČöĄō■üĒĮ╠ī¦ÖCŲ„╚╦═Ļ│╔Å═ļs╚╬䚯¼╠žäe╩Ūī”ė┌ąĶę¬Ė▀Č╚ņ`Ū╔Ą─╚╬äšüĒšfĪŻ╚╗Č°Ż¼CyberDemo ═©▀^└¹ė├─ŻöM╚╦ŅÉ╩ŠĘČüĒ═Ļ│╔šµīŹ╩└ĮńĄ─ÖCŲ„╚╦▓┘┐v╚╬䚯¼Å─Č°£p╔┘┴╦ī”╬’└Ēė▓╝■Ą─ąĶŪ¾Ż¼╩╣Ą├▀h│╠║═▓óąąöĄō■╩š╝»│╔×ķ┐╔─▄ĪŻ┤╦═ŌŻ¼═©▀^─ŻöMŲ„īŻī┘Ą─öĄō■į÷ÅŖ╝╝ągŻ¼CyberDemo ’@ų°į÷ÅŖ┴╦╚╬äšąį─▄Ż¼╔·│╔Ą─öĄō■╝»▒╚į┌šµīŹ╩└ĮńŁhŠ│ųą╩š╝»Ą─öĄō■╝»┤¾Ą├ČÓĪŻ
ĪĪĪĪCyberDemo Ą─ĘĮĘ©Å─į┌─ŻöMŁhŠ│ųą╩╣ė├Ą═│╔▒ŠįOéõ▀Mąą▀h│╠▓┘ū„╩š╝»╚╦ŅÉ╩ŠĘČķ_╩╝ĪŻļS║¾Ż¼═©▀^ÅVĘ║Ą─į÷ÅŖĘĮĘ©ī”öĄō■▀MąąžSĖ╗╠Ä└ĒŻ¼░³└©Ė„ĘNęĢėX║═╬’└ĒŚl╝■Ż¼ęį╠ßĖ▀ė¢ŠÜ▓▀┬įī”šµīŹ╩└Įńūā╗»Ą─¶ö░¶ąįĪŻįō┐“╝▄▓╔ė├šn│╠īW┴Ģ▓▀┬į▀Mąą▓▀┬įė¢ŠÜŻ¼╩ūŽ╚╩╣ė├į÷ÅŖöĄō■╝»Ż¼╚╗║¾ųØuę²╚ļšµīŹ╩└Įń╩ŠĘČęįī”▓▀┬į▀Mąą╬óš{ĪŻ┼c╩╣ė├šµīŹ╩└Įń╩ŠĘČöĄō■╬óš{Ą─ŅAė¢ŠÜ▓▀┬įŽÓ▒╚Ż¼▀@ĘNĘĮĘ©┤_▒Ż┴╦ŲĮĘĆĄ─Å──ŻöMĄĮ¼FīŹĄ─▀^Č╔Ż¼ĮŌøQ┴╦╣ŌššĪó╬’¾wÄū║╬║═│§╩╝ū╦ä▌ūā╗»Ą╚å¢Ņ}Ż¼Č°¤oąĶŅ~═ŌĄ─╩ŠĘČĪŻ

ĪĪĪĪį┌Ė„ĘN▓┘┐v╚╬äšųąŻ¼CyberDemo Ą─ąį─▄┴Ņ╚╦ėĪŽ¾╔Ņ┐╠ĪŻŽÓ▒╚é„ĮyĘĮĘ©Ż¼CyberDemo į┌╚╬äš│╔╣”┬╩╔Ž╚ĪĄ├┴╦’@ų°╠ßĖ▀ĪŻė╚ŲõųĄĄ├ūóęŌĄ─╩ŪŻ¼į┌╔µ╝░╬┤ęŖ▀^Ą─╬’¾wĢrŻ¼CyberDemo Ą─Ę║╗»─▄┴”╠žäe═╗│÷Ż¼į┌ą²▐Dą┬╬’¾wĄ─│╔╣”┬╩▀_ĄĮ42.5%Ż¼▀@╩Ūé„ĮyĘĮĘ©▒Ē¼FĄ─’@ų°’w▄SĪŻī”▒╚╗∙ŠĆ░³└©Ž╚▀MĄ─ęĢėXŅAė¢ŠÜ─Żą═╚ń PVRĪóMVP ║═ R3MŻ¼CyberDemo Ą─│╔╣”ų«╠Ä═╗’@┴╦Ųõą¦┬╩║═ĘĆĮĪąįŻ¼ęį╝░Ųõ─▄ē“ä┘▀^į┌šµīŹ╩└Įń╩ŠĘČöĄō■╝»╔Ž╬óš{Ą──Żą═ĪŻ
ĪĪĪĪCyberDemo Ą─äōą┬ĘĮĘ©═©▀^└¹ė├į÷ÅŖĄ──ŻöMöĄō■╠¶æ┴╦ĮŌøQīŹļHå¢Ņ}▒žĒÜę└┘ćšµīŹ╩ŠĘČöĄō■Ą─é„Įyė^─ŅĪŻ═©▀^ CyberDemo Ą─ąį─▄╦∙š╣╩ŠĄ─Įø“×öĄō■Ż¼═╗’@┴╦═©▀^öĄō■į÷ÅŖį÷ÅŖĄ──ŻöMöĄō■į┌ÖCŲ„╚╦▓┘┐v╚╬䚥─ārųĄĘĮ├µ─▄ē“│¼įĮšµīŹ╩└ĮńöĄō■ĪŻļm╚╗×ķ├┐éĆ╚╬äšįOėŗ─ŻöMŁhŠ│ąĶę¬Ņ~═ŌĄ─╣żū„Ż¼Ą½£p╔┘┴╦öĄō■╩š╝»Ą─╚╦×ķĖ╔ŅAŻ¼▓ó▒▄├Ō┴╦Å═ļsĄ─¬ääŅįOėŗ▀^│╠Ż¼×ķÖCŲ„╚╦▓┘┐vŅIė“ĦüĒ┴╦ę╗ĘN┐╔öUš╣ŪęĖ▀ą¦Ą─ĮŌøQĘĮ░ĖĪŻ
ĪĪĪĪ╬─š┬ā╚╚▌āH╣®ķåūxŻ¼▓╗śŗ│╔═Č┘YĮ©ūhŻ¼šłųö╔„ī”┤²ĪŻ═Č┘Yš▀ō■┤╦▓┘ū„Ż¼’LļUūįō·ĪŻ
║Żł¾╔·│╔ųą...

║Ż╦ćAIĄ──Żą═ŽĄĮyį┌ć°ļH╩ął÷╔ŽÅV╩▄║├įuŻ¼─┐Ū░šŠā╚└█ėŗ─Żą═öĄ│¼▀^80╚féĆŻ¼║Ł╔wīæīŹĪóČ■┤╬į¬Īó▓Õ«ŗĪóįOėŗĪóözė░Īó’LĖ±╗»łDŽ±Ą╚ČÓŅÉą═æ¬ė├ł÷Š░Ż¼╗∙▒ŠĖ▓╔w╦∙ėąų„┴„äōū„’LĖ±ĪŻ
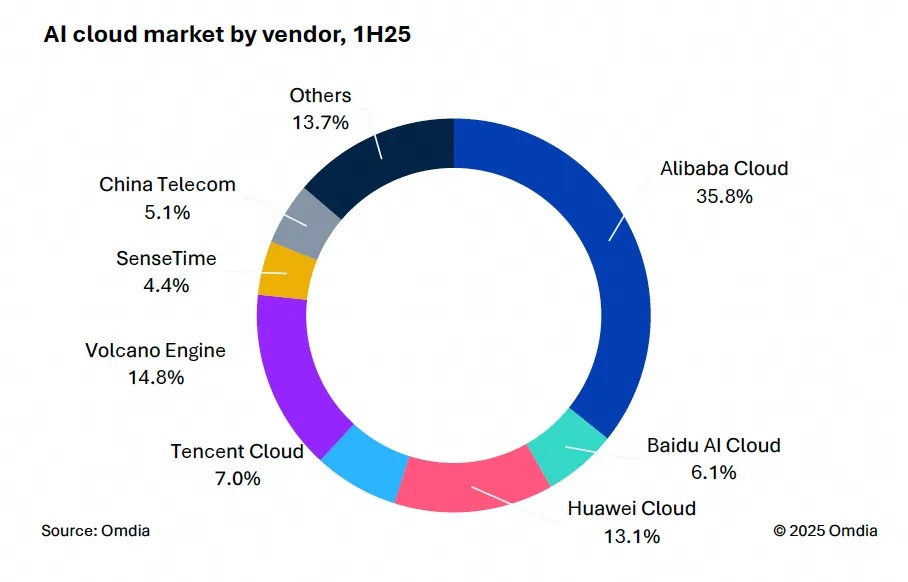
9į┬9╚šŻ¼ć°ļHÖÓ═■╩ął÷š{čąÖCśŗėóĖ╗┬³(Omdia)░l▓╝┴╦ĪČųąć°AIįŲ╩ął÷Ż¼1H25ĪĘł¾ĖµĪŻųąć°AIįŲ╩ął÷░ó└’įŲš╝▒╚8%╬╗┴ąĄ┌ę╗ĪŻ

9į┬24╚šŻ¼╚A×ķ└żņ`š┘ķ_Ī░ųŪ─▄¾w“ׯ¼ę╗Ų┴ĄĮ╬╗Ī▒╚A×ķIdeaHubŪ¦ąą░┘śI¾w“×╣┘ėŗäØ░l▓╝Ģ■ĪŻ

č┼±R╣■ū“╚šą¹▓╝═Ų│÷ā╔┐ŅŅ^┤„╩ĮČ·ÖCŻ¼Ęųäe╩ŪŲĮ░Õš±─żĄ─YH-4000║═äė╚”įŁ└ĒĄ─YH-C3000ĪŻ
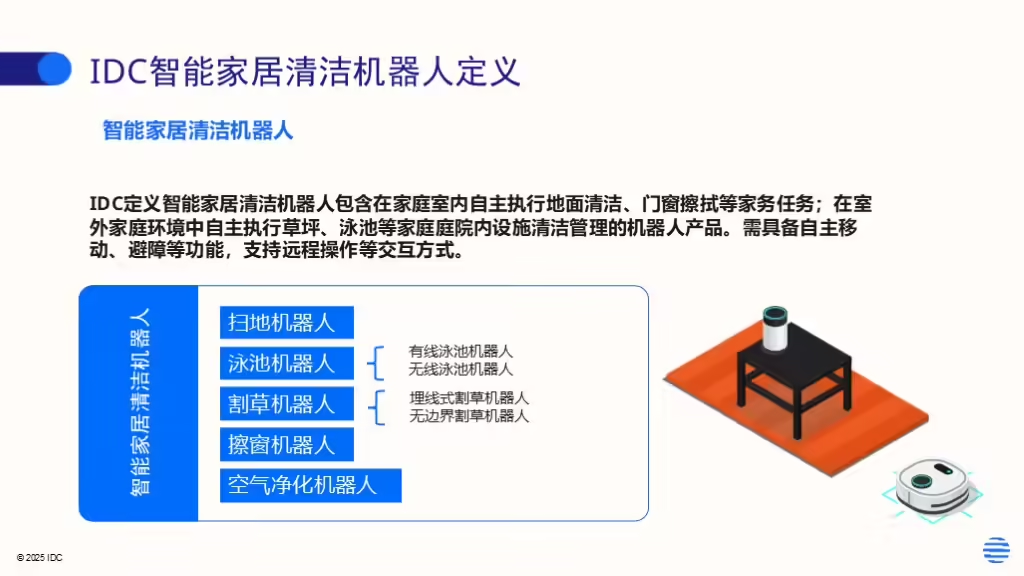
IDCĮ±╚š░l▓╝Ą─ĪČ╚½Ū“ųŪ─▄╝ęŠėŪÕØŹÖCŲ„╚╦įOéõ╩ął÷╝ŠČ╚Ė·█Öł¾ĖµŻ¼2025─ĻĄ┌Č■╝ŠČ╚ĪĘ’@╩ŠŻ¼╔Ž░ļ─Ļ╚½Ū“ųŪ─▄╝ęŠėŪÕØŹÖCŲ„╚╦╩ął÷│÷žø1,2╚f┼_Ż¼═¼▒╚į÷ķL33%Ż¼’@╩Š│÷ŲĘŅÉÅŖä┼Ą─╩ął÷ąĶŪ¾ĪŻ

ĘĄ╗žų„Ēō ®« ĻPė┌╬ęéā ®« ā╚╚▌┬ōŽĄ ®« ┬ōŽĄ╬ęéā ®« ├Ōž¤┬Ģ├„ ®« įŁäōą┬┬ä ®« ķTæ¶░µ
Copyright www.9c1h.cn ųą╬─┐Ų╝╝┘YėŹ 2009-2025 all rights reserved ŠWšŠ┬ōŽĄ╬óą┼ xishuinet
ĻPµIį~Ż║CITNews|Citnewsųą╬─┐Ų╝╝┘YėŹ|ųą╬─┐Ų╝╝┘YėŹŠW|┐Ų╝╝┘YėŹŠW|ųąć°┐Ų╝╝┘YėŹ|ųąć°┐Ų╝╝ą┬┬äŠW|ųąć°┐Ų╝╝┘YėŹŠW|┐ņ┐Ų╝╝|ą┬┐Ų╝╝|ųą╬─┐Ų╝╝öĄ┤aŅ^Śl╠¢|ųą╬─ęŲäėą┬├Į¾w